- ���g����
�������P���ڙC���ˣ��������Iȫ�³��Pʩ����Q����
2025-09-26 14:18:11 ��Դ�������¸ߝ��坍�O���O������˾
�ڴ������I�У����w�����ܵ���ˮ���g��Ҫ�����M�г�����Pʩ���������ں������w�e�ߴ��y���˹����P��ʩ��Ч�ʡ���ȫ���h����������u���������P���ڙC����ȡ�����������P���ڙC���˵đ��ã��܉F���w�����M�и�Ч����ȫ���صij��P��ϴ���I���鴬���S�o�ṩ��һ�Nȫ�µĽ�Q������
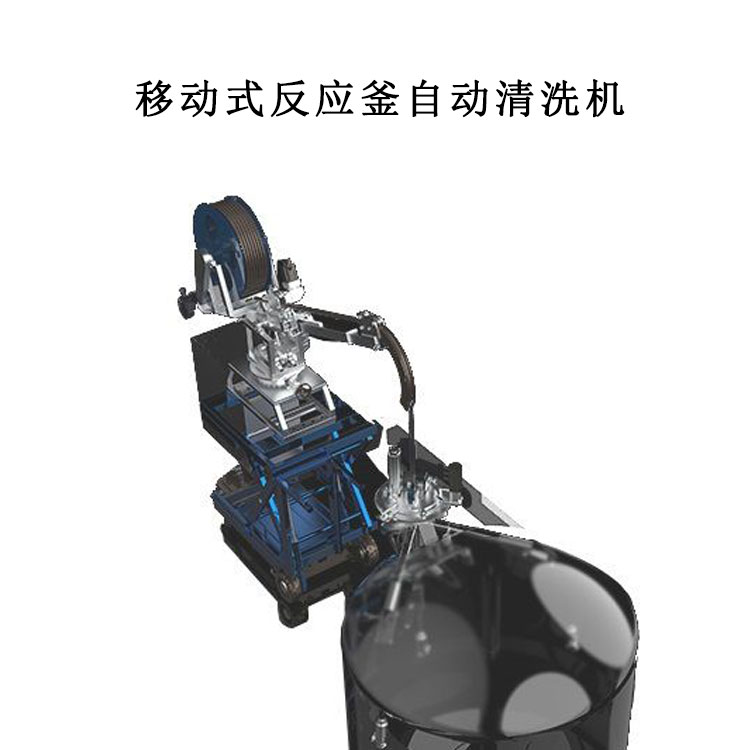
�¸ߝ��������P��ϴ���ڙC���ˌ����߉�ˮ�������P�����ϵ�y�������������ڙC�������I���߅f�{��һ�w��ͨ�^���߉��ë@��ˮ�������P�����������ڙC���˞��d�w�����d��ճ��P��ϴ���������P�^���Юa�����P���͏Uˮ�����ŷţ��_���p���ŷš����խh����Ŀ�ġ�
�������P��ϴ�C�������I�^���ЃH���˹��ֳ��b�����������ڙC�������I�����ڙC���˱�����������������݆ʽ�Ƅӡ�����150-200kg��ؓ�d���������w�`�������ɸ߿����I�����P�^���У����ڙC���˴��d���߉�ˮ���P��ϴ�����I�����PЧ��50-75�O/h�����P�ȼ����_SA2.5�����P�r�o�ۉm���o��Ⱦ���o���g���o�Uˮ�M�������и�Ч���h������ȫ��ʩ��Ч����
һ��ʩ��ǰ�ʂ�
1.�����z�飺�������M��ȫ��z�飬�˽�w������P�g�̶ȡ��۹��ֲ���r�Լ����w�Y�����c���ƶ�������ʩ��������
2.�C�����{ԇ�������ڙC�����M��ȫ���{ԇ�������Ƅ����ܡ����P�b�á���ϴ�b�á������b�á�����ϵ�y�͙z�yϵ�y�ȣ��_���C���˸�헹���������
3.��ȫ���o���ڴ����܇��O�ð�ȫ��ʾ��־����ֹ�o�P�ˆT�M�����I�^��ͬ�r�������I�ˆT�M�а�ȫ��Ӗ��ʹ�����ՙC���˵IJ��������Ͱ�ȫע����헡�
�O��ʂ䣺�ʂ��������P�����Լ��o���O�䣬���Դ��ˮ�ܵȡ�
����ʩ���^��
1.�C���˲��𣺌����ڙC���˷����ڴ��w�������ʼλ�ã����������b�ã�ʹ�C�����ι������ڴ��w�ϣ�
2.���I�����O�ã��������w����Ġ�r��ͨ�^�h�̲����K���O�ÙC���˵��Ƅ��ٶȡ����P�b�õ��D�ٺ͉�������ϴ�b�õ�ˮ�������I������
3.�b�ؿ������I�����әC���ˣ��C���˰����A�O�ą����M�г��P����ϴ���I�������I�^���У��������H��r�`��ͨ�^�b�������ƙC�������I��
4.�˹��O���c�{���������ˆTͨ�^�h�̲����K�ˌ��r�O�ؙC���˵����I��B����l�F������r�����r�{���C���˵Ą��������ڙC���˟o��̎��������^���M���˹��o�����I��
5.���I�^���ГQ�����C�������һ���^������I��ͨ�^�h�̲����K�˿��ƙC�����Ƅ�����һ�����I�^���^�m�M�����I��
����ʩ����̎��
1.�C���˻��գ����I��ɺ��C���ˏĴ��w������գ����C�����M���坍�ͱ��B���z���������ĥ�p��r�����r���Q�p�ĵIJ�����
2.�����z�飺�����w�����M��ȫ��z�飬�u�����P��ϴЧ������l�F��δ̎���Ƀ��ą^���M�ж���̎����
3.�������I�F�����������I�F�����������s��_�����I�F���ĭh��������
���Ͼ��ǵ¸ߝ���������ʩ���F꠲��ô������P�C�����M��ʩ�������̣�Ŀǰ�ڌ��H��ʩ���^���У���ؓ��һ��ȫ�L��400�ף��s74�ľ����P��ϴ���I��Ч���ஔ������6����ͬ�����I���B�m����90����С�r������ɽ���V�ݡ��麣�ȶ���M�д���������Pʩ�������F�˴����ИI�Ќ��ڴ��w������P��ϴʩ���Ľ�����Ч��
�����°l�� -








-
�aƷ����
-
��˾����
-

��ُ����
20���DƬ -

�ИI���ø߉���ϴ�C
16���DƬ
-
�� ��
- ϵ�ˣ�����
- 늡�Ԓ��010-64437473
- �֡��C��13810705717
- �����棺010-64437334
- �]������100029
- �ء�ַ�������Ж|�Dž^�����h�|·37̖�A��¡���H�̄�B��302
- �W��ַ�� https://digcher.cn.goepe.com/
http://www.fulaite.com.cn